

三维旋转 – 四元数的基本概念以及四元数与欧拉角、旋转矩阵的相互转换
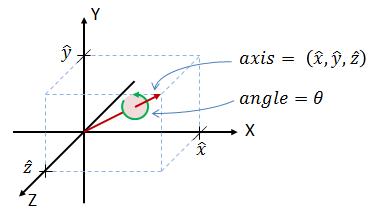
1 引言 本文将对四元数的基本概念进行介绍,并将详细介绍四元数与欧拉角、四元数与旋转矩阵之间的相互转换。另外还将介绍如何使用四元数旋转对象,以及以及如何将多个旋转操作连接成一个四元数。 2 四元数的简单表示 一个四元数由四个元素表示: q=q_{0} +iq_{1}+jq_{2}+kq_{3} \t…
- 3D数学基础
- 2022-05-12

三维旋转 – 欧拉角和旋转矩阵的基本概念以及相互转换
本文将以常用的Tait-Bryan欧拉角为基础,描述如何从欧拉角转换为旋转矩阵,以及如何从旋转矩阵转换为欧拉角,以及如何将多个旋转连接为一个旋转矩阵。 文章分为两个部分,第一部分将详细解释相关假设和数学约定,第二部分将描述重要的转换部分以及Java和C++代码。 任何需要对三维空间的物体进行操作的人…
- 3D数学基础
- 2022-04-19